📌本文采用wolai制作: 原文 link
推荐先看下背后的io多路复用 和 reactor设计模式 。
本文分析muduo中的事件循环 —EventLoop 及其相关类
1 TODO·
遗留待看:
[ ] EventLoop 线程模型
[ ] Acceptor源码
[ ] Channel tie作用
从一个例子入手, muduo官方的echo server main函数如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 int main (int argc, char * argv[]) LOG_INFO << "pid = " << getpid () << ", tid = " << CurrentThread::tid (); LOG_INFO << "sizeof TcpConnection = " << sizeof (TcpConnection); if (argc > 1 ) { numThreads = atoi (argv[1 ]); } bool ipv6 = argc > 2 ; EventLoop loop; InetAddress listenAddr (2000 , false , ipv6) ; EchoServer server (&loop, listenAddr) ; server.start (); loop.loop (); }
EventLoop作为核心,驱动EchoServer
2 EventLoop ·
2.1 类图·
classDiagram
class EventLoop {
void loop()
std::unique_ptr poller_;
}
class Poller {
ChannelMap channels_;
}
class EPollPoller {
// 基于epoll
EventList events_;
}
class PollPoller {
// 基于poll(不关注)
}
class Channel {
// 管理epoll event
}
Poller <|-- EPollPoller
Poller <|-- PollPoller
EventLoop *-- Poller: poll
EventLoop -- Channel
Poller -- Channel
2.2 loop·
先看构造函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 EventLoop::EventLoop () : looping_ (false ), quit_ (false ), eventHandling_ (false ), callingPendingFunctors_ (false ), iteration_ (0 ), threadId_ (CurrentThread::tid ()), poller_ (Poller::newDefaultPoller (this )), timerQueue_ (new TimerQueue (this )), wakeupFd_ (createEventfd ()), wakeupChannel_ (new Channel (this , wakeupFd_)), currentActiveChannel_ (NULL )
EventLoop最重要的接口是loop, 看下实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 const int kPollTimeMs = 10000 ;void EventLoop::loop () assert (!looping_); assertInLoopThread (); looping_ = true ; quit_ = false ; LOG_TRACE << "EventLoop " << this << " start looping" ; while (!quit_) { activeChannels_.clear (); pollReturnTime_ = poller_->poll (kPollTimeMs, &activeChannels_); ++iteration_; if (Logger::logLevel () <= Logger::TRACE) { printActiveChannels (); } eventHandling_ = true ; for (Channel* channel : activeChannels_) { currentActiveChannel_ = channel; currentActiveChannel_->handleEvent (pollReturnTime_); } currentActiveChannel_ = NULL ; eventHandling_ = false ; doPendingFunctors (); } LOG_TRACE << "EventLoop " << this << " stop looping" ; looping_ = false ; }
代码很清晰:
从poller中查询当前可用的channel
每个channel代表一个可用事件的handler,处理handler
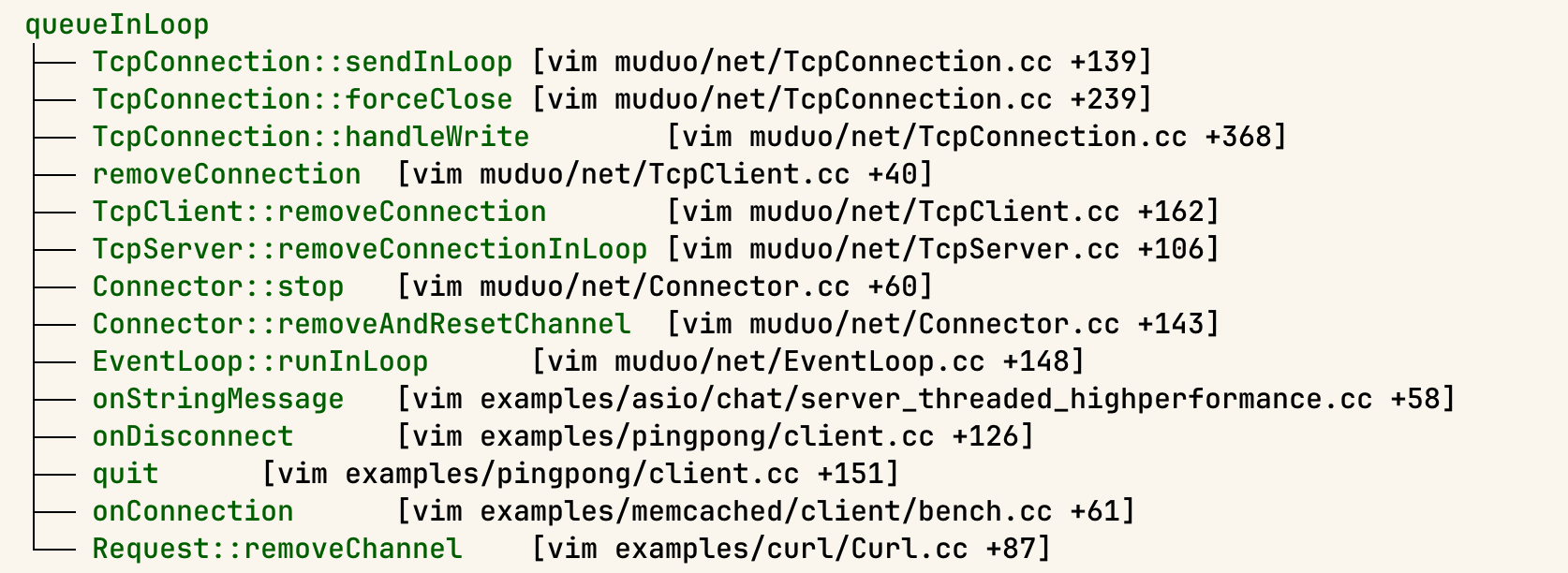
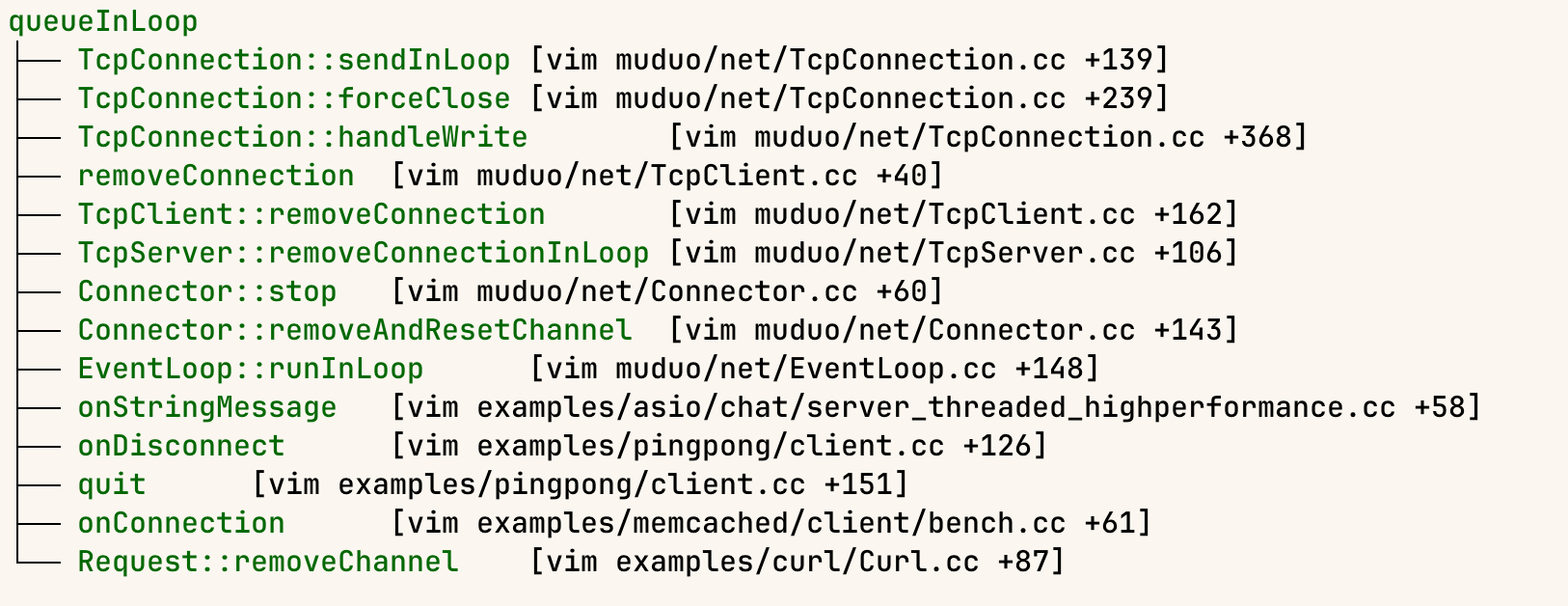
除了poller返回的channel外,事件循环还可以执行其他任务,这些任务都都放到doPendingFunctors中, 这些任务通过 queueInLoop 函数注册,调用点包括:
📌TODO(zhangxingrui): 抽一个函数来分析
poller的分析见poll
channel的分析见 Channel.
再看下doPendingFunctors相关逻辑:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void EventLoop::doPendingFunctors () std::vector<Functor> functors; callingPendingFunctors_ = true ; { MutexLockGuard lock (mutex_) ; functors.swap ( pendingFunctors_ ); } for (const Functor &functor : functors) { functor (); } callingPendingFunctors_ = false ; }
关键是 pendingFunctors_。
往pendingFunctors_中注册的函数为:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void EventLoop::queueInLoop (Functor cb) { MutexLockGuard lock (mutex_) ; pendingFunctors_ .push_back (std::move (cb)); } if (!isInLoopThread () || callingPendingFunctors_) { wakeup (); } }
看下调用链:
主要在TcpConnection和 TcpClient , TcpServer以及Conector中会用。这些内容不是本文分析重点,予以跳过。
除了 pendingFunctors_ 可已关注外,还有一个 wakeup函数比较好奇。
2.3 wakeup·
1 2 3 4 5 6 7 8 9 10 11 void EventLoop::wakeup () uint64_t one = 1 ; ssize_t n = sockets::write ( wakeupFd_ , &one, sizeof one); if (n != sizeof one) { LOG_ERROR << "EventLoop::wakeup() writes " << n << " bytes instead of 8" ; } }
逻辑很简单,往wakeFd_中写入一个one。wakeFd来自构造函数:
1 2 3 4 wakeupFd_(createEventfd()),
1 2 3 4 5 6 7 8 9 10 11 12 int createEventfd () { int evtfd = :: eventfd (0 , EFD_NONBLOCK | EFD_CLOEXEC); if (evtfd < 0 ) { LOG_SYSERR << "Failed in eventfd" ; abort (); } return evtfd; }
解释下这里的eventfd:
eventfd 是一种用于事件通知的文件描述符,通常用于进程或线程之间的异步事件通知和同步操作。它是 Linux 系统调用之一,通过创建一个特殊的文件描述符来实现事件通知机制。
函数原型
1 2 #include <sys/eventfd.h> int eventfd (unsigned int initval, int flags) ;
参数
initval :eventfd 的初始值,通常设置为 0。flags :用于设置 eventfd 的行为,常见的标志包括:
EFD_NONBLOCK :使 eventfd 以非阻塞模式操作。EFD_CLOEXEC :设置文件描述符在执行 exec 系统调用时自动关闭(close-on-exec)。
eventfd 常用于以下场景:
线程间同步 :在多线程程序中,一个线程可以通过写入 eventfd 来通知另一个线程。进程间通信(IPC) :用于进程之间的事件通知机制。异步事件处理 :结合 epoll 等 I/O 多路复用机制,实现高效的异步 I/O 事件处理。
显然这里的wakeup类似生产者消费者模型中,队列来了一个新element,通知线程唤醒来取去消费。
既然有socket::write, 那一定有一端在读。分析下源码:
1 2 3 4 5 6 7 wakeupChannel_ (new Channel (this , wakeupFd_)),wakeupChannel_->setReadCallback (std::bind (&EventLoop::handleRead, this )); wakeupChannel_->enableReading ();
原来给这个wakeupFd添加了一个channel(channel分析见下文),并开启Read监听。只有有人往fd写入,事件就会通知到handleRead回调。
1 2 3 4 5 6 7 8 9 10 11 void EventLoop::handleRead () uint64_t one = 1 ; ssize_t n = sockets::read (wakeupFd_, &one, sizeof one); if (n != sizeof one) { LOG_ERROR << "EventLoop::handleRead() reads " << n << " bytes instead of 8" ; } }
为啥要做这种“无用功”?回到loop循环。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 void EventLoop::loop () ... while (!quit_) { activeChannels_.clear (); pollReturnTime_ = poller_->poll (kPollTimeMs, &activeChannels_); ... doPendingFunctors (); } LOG_TRACE << "EventLoop " << this << " stop looping" ; looping_ = false ; }
wakeup是用来告诉EventLoop现在有个pending的functor需要执行,假设EventLoop的thread正在polling,如果没有wakeup的waitFd,只要没有其他fd事件发生,也没有超时,poll就会一直阻塞,导致pending functor得不到执行。所以需要这种机制来唤醒eventloop thread。
📌这种机制和采用信号量或者条件变量的性能对比?
能想到的这种机制可以跨进程玩,但是信号量也可以。 信号量多了一个计数,更适合管理资源。 在同步唤醒(特指生产者消费者这种模式)下,性能谁更好?
3 Poller (EpollPoller)·
在muduo中,有两种类型的poller:
一种基于epoll一种基于poll (两种的区别见: io多路复用 ) ,具体使用哪种,见newDefaultPoller函数:
1 2 3 4 5 6 7 8 9 10 11 Poller* Poller::newDefaultPoller (EventLoop* loop) if (::getenv ("MUDUO_USE_POLL" )) { return new PollPoller (loop); } else { return new EPollPoller (loop); } }
是通过MUDUO_USE_POLL环境变量来设置的,默认都是epoll,通常epoll性能也会更好, 所以下面只分析EpollPoller
先看基类有哪些接口:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 class Poller : noncopyable{ public : typedef std::vector<Channel*> ChannelList; Poller (EventLoop* loop); virtual ~Poller (); virtual Timestamp poll (int timeoutMs, ChannelList* activeChannels) 0 ; virtual void updateChannel (Channel* channel) 0 ; virtual void removeChannel (Channel* channel) 0 ; static Poller* newDefaultPoller (EventLoop* loop) protected : typedef std::map<int , Channel*> ChannelMap; ChannelMap channels_; private : EventLoop* ownerLoop_; };
显然每个poller绑定一个Eventloop.
回到EpollPoller
3.1 poll·
函数签名如下:
1 2 Timestamp poll (int timeoutMs, ChannelList* activeChannels) override ;
ChannelList在基类中是一个typedef, 本质上是个 std::vector<Channel*>
函数实现如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Timestamp EPollPoller::poll (int timeoutMs, ChannelList* activeChannels) LOG_TRACE << "fd total count " << channels_.size (); int numEvents = ::epoll_wait (epollfd_, &*events_.begin (), static_cast <int >(events_.size ()), timeoutMs); int savedErrno = errno; Timestamp now (Timestamp::now()) ; if (numEvents > 0 ) { LOG_TRACE << numEvents << " events happened" ; fillActiveChannels (numEvents, activeChannels); if (implicit_cast <size_t >(numEvents) == events_.size ()) { events_.resize (events_.size ()*2 ); } } return now; }
调用epoll_wait, 将监听到的事件存放在 events_数组中,或者等到超时(EventLoop中默认超时时间是10s, 见 这里 。
epoll_fd_来自构造函数events_ 是一个初始大小为16的数组:1 2 3 typedef std::vector<struct epoll_event> EventList;EventList events_;
1 2 3 4 5 6 static const int kInitEventListSize = 16 ; EPollPoller::EPollPoller (EventLoop* loop) : Poller (loop), epollfd_ (::epoll_create1 (EPOLL_CLOEXEC)), events_ (kInitEventListSize)
如果返回的events数量等于了当前的size,则扩容2倍。
额外补充: epoll_create1传入的flag EPOLL_CLOEXEC的含义: 当进程调用 execve 时,epoll fd自动关闭。 避免被子进程集成这个epoll fd。
再看 fillActiveChannels 函数:
1 2 3 4 5 6 7 8 9 void EPollPoller::fillActiveChannels (int numEvents, ChannelList *activeChannels) const assert (implicit_cast <size_t >(numEvents) <= events_.size ()); for (int i = 0 ; i < numEvents; ++i) { Channel *channel = static_cast <Channel *>( events_ [i].data.ptr); channel->set_revents (events_[i].events); activeChannels->push_back (channel); } }
在epoll_wait返回ready的event后,将events 转为channel, event的结构为:
1 2 3 4 5 6 struct epoll_event { uint32_t events; epoll_data_t data; } __EPOLL_PACKED;
data字段是user data. 在fillActiveChannels中, event的data字段为channel pointer, 并通过set_revents设置当前真正监听到的event。之后channel就可以消费该事件 。
3.2 初始化event user data为channel·
那么 epoll_event是如何初始化的: 即 event.data.ptr 是如何初始化为 channel的?
搜索源码, 发现是EPollPoller::update函数中设置:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 void EPollPoller::update (int operation, Channel *channel) struct epoll_event event; memZero (&event, sizeof event); event.events = channel->events (); event.data.ptr = channel; int fd = channel->fd (); LOG_TRACE << "epoll_ctl op = " << operationToString (operation) << " fd = " << fd << " event = { " << channel->eventsToString () << " }" ; if ( ::epoll_ctl (epollfd_, operation, fd, &event ) < 0 ) { if (operation == EPOLL_CTL_DEL) { LOG_SYSERR << "epoll_ctl op =" << operationToString (operation) << " fd =" << fd; } else { LOG_SYSFATAL << "epoll_ctl op =" << operationToString (operation) << " fd =" << fd; } } }
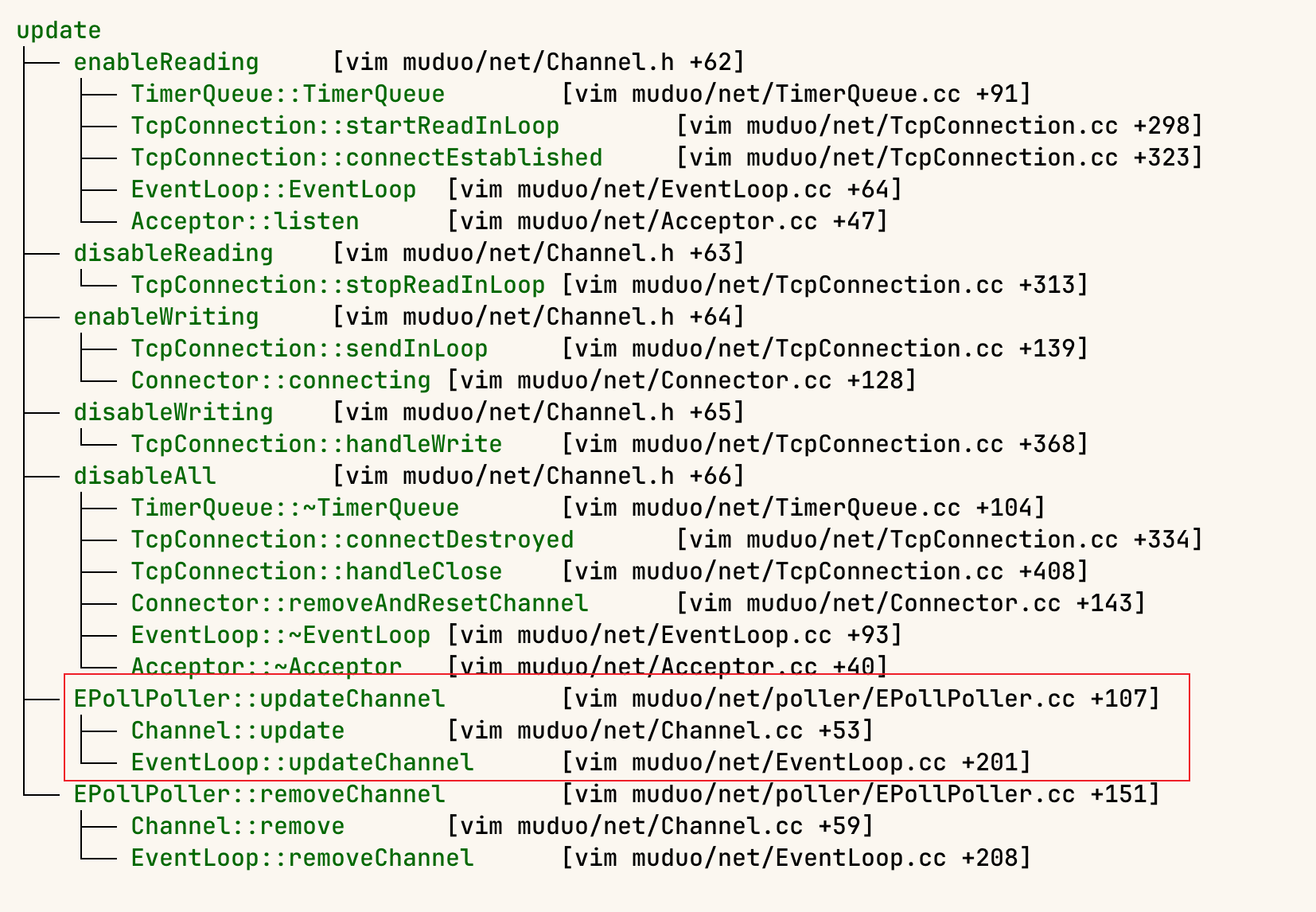
找下调用链:
发现调用是通过EPollPoller::updateChannel, 再通过 Channel::update调用进来的。Channel::update的分析见下文:设置可监听类型。
现在只看 EPollPoller::updateChannel
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 void EPollPoller::updateChannel (Channel* channel) Poller::assertInLoopThread (); const int index = channel->index (); LOG_TRACE << "fd = " << channel->fd () << " events = " << channel->events () << " index = " << index; if (index == kNew || index == kDeleted) { int fd = channel->fd (); if (index == kNew) { assert (channels_.find (fd) == channels_.end ()); channels_ [fd] = channel; } else { assert (channels_.find (fd) != channels_.end ()); assert (channels_[fd] == channel); } channel->set_index (kAdded); update (EPOLL_CTL_ADD, channel); } else { int fd = channel->fd (); (void )fd; assert (channels_.find (fd) != channels_.end ()); assert (channels_[fd] == channel); assert (index == kAdded); if (channel->isNoneEvent ()) { update (EPOLL_CTL_DEL, channel); channel->set_index (kDeleted); } else { update (EPOLL_CTL_MOD, channel); } } }
提供了一层epoll_cntl的op的封装,用 channel的 index 表明当前是什么操作,支持的index有:
1 2 3 4 5 6 namespace { const int kNew = -1 ;const int kAdded = 1 ;const int kDeleted = 2 ;}
此外, Poller class内部还有一个 channels_ (本质是一个map),保存当前加入过的channel
4 Channel·
官方对channel的解释是:
看下channel包含的重要的public interface和member:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 const int Channel::kNoneEvent = 0 ;const int Channel::kReadEvent = POLLIN | POLLPRI;const int Channel::kWriteEvent = POLLOUT;Channel (EventLoop* loop, int fd);~Channel (); void handleEvent (Timestamp receiveTime) void setReadCallback (ReadEventCallback cb) move (cb); }void setWriteCallback (EventCallback cb) move (cb); }void setCloseCallback (EventCallback cb) move (cb); }void setErrorCallback (EventCallback cb) move (cb); } void set_revents (int revt) void enableReading () update (); } void disableReading () update (); }void enableWriting () update (); }void disableWriting () update (); }void disableAll () update (); }bool isWriting () const return events_ & kWriteEvent; }bool isReading () const return events_ & kReadEvent; }EventLoop* loop_; const int fd_; int events_;int revents_; ReadEventCallback readCallback_; EventCallback writeCallback_; EventCallback closeCallback_; EventCallback errorCallback_;
明显channel和监听事件相关
一个channel只 和一个fd绑定, fd从构造函数传入,结合注释来看,channel不管理fd的生命周期。
events 控制要监听哪些事件,这些监听事件的操作方法通过一系列enable和disable方法暴露给caller控制。revents_为实际发生的事件类型,通过 set_revents暴露。
前文Poller (EpollPoller)已经分析,这里不再赘述。
📌TODO(zhangxingrui): 贴poller调用fillactivechannels的ref
4.1 handleEvent·
在EventLoop 的loop中找到可用channel后,就会调用handleEvent函数:
1 2 3 4 5 6 7 void Channel::handleEvent (Timestamp receiveTime) ... handleEventWithGuard (receiveTime); ... }
转到handleEventWithGuard:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 void Channel::handleEventWithGuard (Timestamp receiveTime) eventHandling_ = true ; LOG_TRACE << reventsToString (); if ((revents_ & POLLHUP) && !(revents_ & POLLIN)) { if (logHup_) { LOG_WARN << "fd = " << fd_ << " Channel::handle_event() POLLHUP" ; } if (closeCallback_) closeCallback_ (); } if (revents_ & POLLNVAL) { LOG_WARN << "fd = " << fd_ << " Channel::handle_event() POLLNVAL" ; } if (revents_ & (POLLERR | POLLNVAL)) { if (errorCallback_) errorCallback_ (); } if (revents_ & (POLLIN | POLLPRI | POLLRDHUP)) { if (readCallback_) readCallback_ (receiveTime); } if (revents_ & POLLOUT) { if (writeCallback_) writeCallback_ (); } eventHandling_ = false ; }
处理很简单,看当前是什么事件(可能是一组事件),就调用对应回调。
4.1.1 epoll event flag解释·
额外补充: handleEventWithGuard和 enable/disable 系列函数中的 POLLxx这些flag的含义:
EPOLLIN :
表示对应的文件描述符可以读取数据(包括普通数据和优先数据)。
EPOLLOUT :
EPOLLRDHUP :
表示对端关闭了连接的一部分,即读取方向上的挂起事件。这在检测对端关闭连接时非常有用。
EPOLLPRI :
表示有紧急数据可读,这通常用于带外数据(out-of-band data)。
EPOLLERR :
表示对应的文件描述符发生错误。当文件描述符发生错误时,这个事件将被触发。
EPOLLHUP :
表示对应的文件描述符被挂起。通常表示管道或者套接字的一端被关闭。
EPOLLET :
表示将文件描述符设置为边缘触发(Edge Triggered)模式。在这种模式下,当文件描述符从未就绪到就绪时,epoll 仅会报告一次事件。
EPOLLONESHOT :
表示使用一次性事件,当这个事件被触发并处理后,必须重新设置事件才能再次触发。
EPOLLEXCLUSIVE :
仅适用于 epoll_wait 系统调用。用于避免惊群效应(thundering herd problem),只有一个等待的线程会被唤醒
EPOLLRDBAND :
EPOLLWRBAND :
4.2 设置可监听类型·
Channel 提供了设置可监听类型的接口:
1 2 3 4 5 6 7 8 9 10 11 12 const int Channel::kNoneEvent = 0 ; const int Channel::kReadEvent = POLLIN | POLLPRI;const int Channel::kWriteEvent = POLLOUT; void enableReading () update (); } void disableReading () update (); } void enableWriting () update (); } void disableWriting () update (); } void disableAll () update (); }
还记得在 初始化event user data为channel 一节提到的什么时候初始化 epoll_event 吗? 就是在如上函数。
update实现:
1 2 3 4 5 6 7 void Channel::update () addedToLoop_ = true ; loop_->updateChannel (this ); }
1 2 3 4 5 6 7 void EventLoop::updateChannel (Channel* channel) assert (channel->ownerLoop () == this ); assertInLoopThread (); poller_->updateChannel (channel); }
到这里就进入 Poller 范围了。
4.3 什么时候新建channel·
看下channel使用到的地方:
前文分析 wakeup 函数时,介绍了 EventLoop新建channel的地方。这里再拿 TcpConnection看看。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 TcpConnection::TcpConnection (EventLoop* loop, const string& nameArg, int sockfd, const InetAddress& localAddr, const InetAddress& peerAddr) : loop_ (CHECK_NOTNULL (loop)), name_ (nameArg), state_ (kConnecting), reading_ (true ), socket_ (new Socket (sockfd)), channel_ (new Channel (loop, sockfd)), localAddr_ (localAddr), peerAddr_ (peerAddr), highWaterMark_ (64 *1024 *1024 ) { channel_->setReadCallback ( std::bind (&TcpConnection::handleRead, this , _1)); channel_->setWriteCallback ( std::bind (&TcpConnection::handleWrite, this )); channel_->setCloseCallback ( std::bind (&TcpConnection::handleClose, this )); channel_->setErrorCallback ( std::bind (&TcpConnection::handleError, this )); LOG_DEBUG << "TcpConnection::ctor[" << name_ << "] at " << this << " fd=" << sockfd; socket_->setKeepAlive (true ); }
绑定传入进来的sockfd, 对这个fd监听读写、close、error handler。
那么sockfd哪来的?
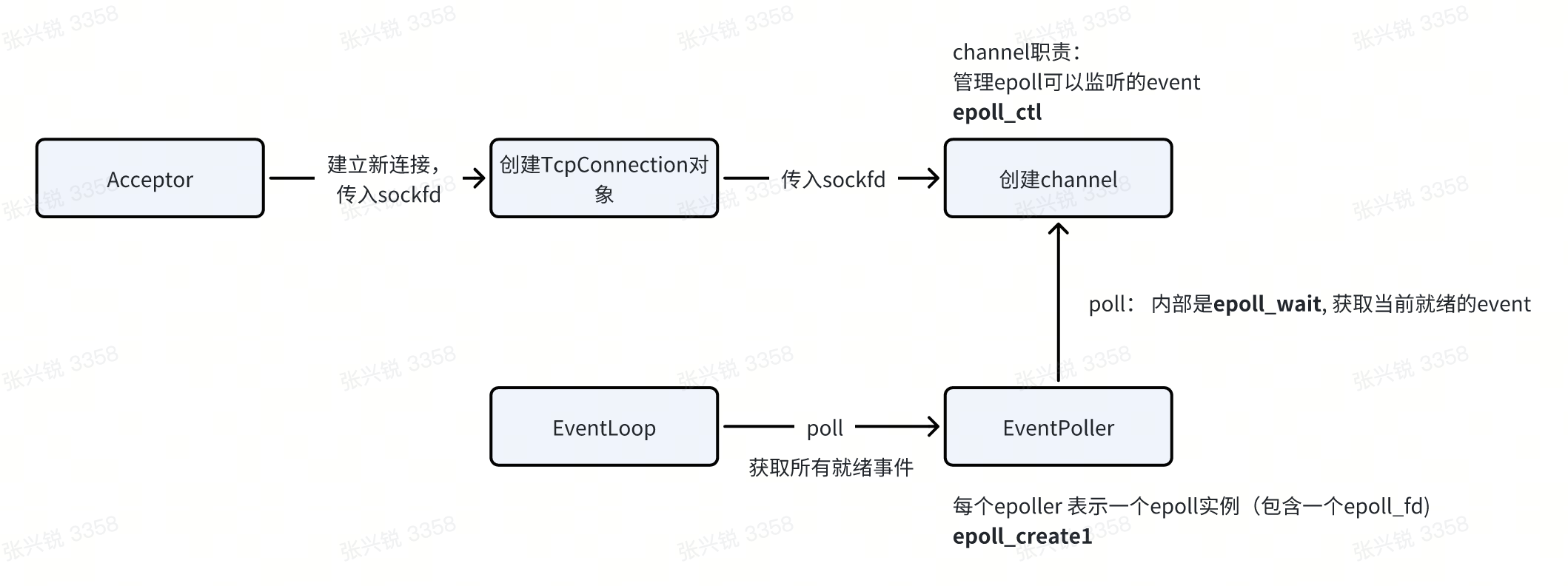
看到Acceptor了,Acceptor用于新建socket链接,将得到的sockfd传入到connection,connection绑定channel。
5 把所有东西串起来·
最后用一张图把所有东西串起来: