vector可以说用到最多的容器了。今天来从源码分析它。
1. _Vector_base·
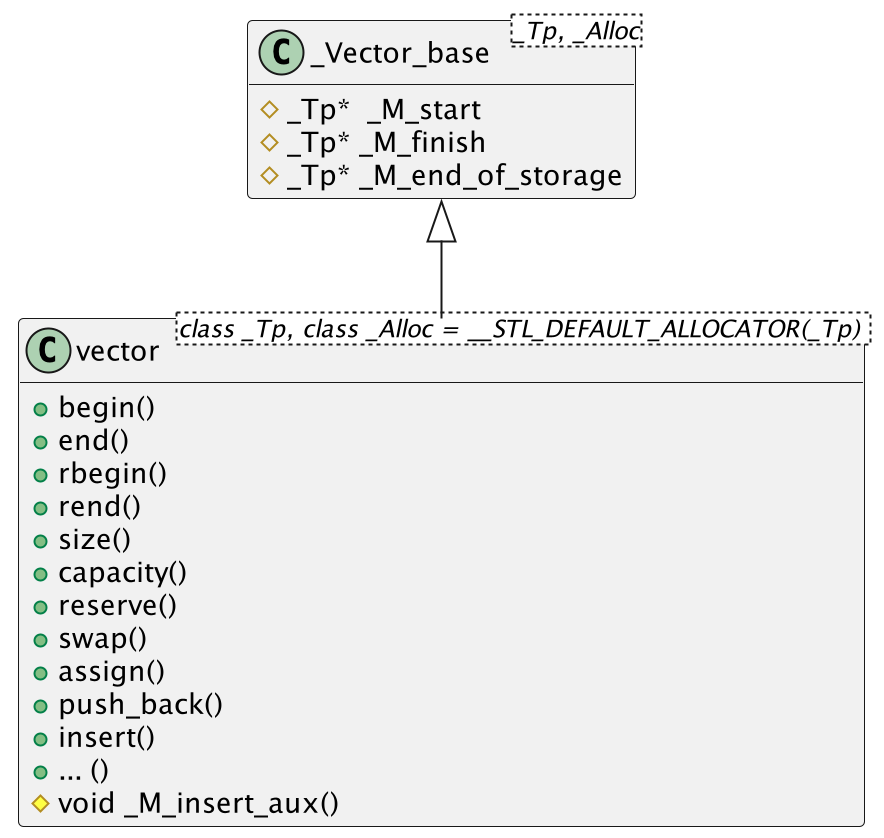
先看类图:
![]()
_Vector_base是 vector 的模板基类,模板接收一个值类型_Tp, 和一个分配器类型_Alloc, 成员变量有三个 _M_start, _M_finish, _M_end_of_storage。 示意图如下:
![vector三个成员变量]()
_M_start :当前可插入的第一个位置_M_finish: 当前可插入的最后一个位置的后一个位置_M_end_of_storage: 当前申请的内存单元个数
代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
template <class _Tp, class _Alloc>
class _Vector_base {
public:
typedef _Alloc allocator_type;
allocator_type get_allocator() const { return allocator_type(); }
_Vector_base(const _Alloc&)
: _M_start(0), _M_finish(0), _M_end_of_storage(0) {}
_Vector_base(size_t __n, const _Alloc&)
: _M_start(0), _M_finish(0), _M_end_of_storage(0)
{
_M_start = _M_allocate(__n);
_M_finish = _M_start;
_M_end_of_storage = _M_start + __n;
}
~_Vector_base() { _M_deallocate(_M_start, _M_end_of_storage - _M_start); }
protected:
_Tp* _M_start;
_Tp* _M_finish;
_Tp* _M_end_of_storage;
typedef simple_alloc<_Tp, _Alloc> _M_data_allocator;
_Tp* _M_allocate(size_t __n)
{ return _M_data_allocator::allocate(__n); }
void _M_deallocate(_Tp* __p, size_t __n)
{ _M_data_allocator::deallocate(__p, __n); }
};
|
可以看到_Vector_base无特别的用途,仅是包装了三个重要变量和分配器类型(还记得vector的默认分配类型是什么吗?)
2. vector·
通常来说,使用vector的接口包括:
- reserve: 预留capacity
- push_back: 尾追加
- pop_back: 尾删除
- insert: 插入
- swap: 交换(通常用于快速析构释放内存)
- Iterator
逐个说下如上接口是如何实现的:
1. reserve·
reserve可能涉及内存分配与拷贝。推荐在构造vector后,立即调用reserve,而不要再“使用”过vector后,再reserve,除非明确要“扩容”到某个大小。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| size_type capacity() const
{ return size_type(_M_end_of_storage - begin()); }
void reserve(size_type __n) {
if (capacity() < __n) {
const size_type __old_size = size();
iterator __tmp = _M_allocate_and_copy(__n, _M_start, _M_finish);
destroy(_M_start, _M_finish);
_M_deallocate(_M_start, _M_end_of_storage - _M_start);
_M_start = __tmp;
_M_finish = __tmp + __old_size;
_M_end_of_storage = _M_start + __n;
}
}
|
- 如果
capacity 比传入的 __n 大,不做任何事情
- 否则:分配
__n个元素大小的内存,将原先的 _M_start 到 _M_finish 之间的内存拷贝到这片内存上,并返回拷贝后的末尾地址返给__tmp
- 析构
_M_start到_M_finish之间的对象
- 释放
_M_start到_M_finish之间的内存
- 更新
_M_start,_M_finish和_M_end_of_storage指针
2. push_back·
push_back可能扩容,扩容的机制是2倍扩容。
1
2
3
4
5
6
7
8
9
|
void push_back(const _Tp& __x) {
if (_M_finish != _M_end_of_storage) {
construct(_M_finish, __x);
++_M_finish;
}
else
_M_insert_aux(end(), __x);
}
|
如果有备用空间,则直接在_M_finish上构造对象,并++_M_finish
否则,调用_M_insert_aux:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
template <class _Tp, class _Alloc>
void
vector<_Tp, _Alloc>::_M_insert_aux(iterator __position, const _Tp& __x)
{
if (_M_finish != _M_end_of_storage) {
construct(_M_finish, *(_M_finish - 1));
++_M_finish;
_Tp __x_copy = __x;
copy_backward(__position, _M_finish - 2, _M_finish - 1);
*__position = __x_copy;
}
else {
const size_type __old_size = size();
const size_type __len = __old_size != 0 ? 2 * __old_size : 1;
iterator __new_start = _M_allocate(__len);
iterator __new_finish = __new_start;
__STL_TRY {
__new_finish = uninitialized_copy(_M_start, __position, __new_start);
construct(__new_finish, __x);
++__new_finish;
__new_finish = uninitialized_copy(__position, _M_finish, __new_finish);
}
__STL_UNWIND((destroy(__new_start,__new_finish),
_M_deallocate(__new_start,__len)));
destroy(begin(), end());
_M_deallocate(_M_start, _M_end_of_storage - _M_start);
_M_start = __new_start;
_M_finish = __new_finish;
_M_end_of_storage = __new_start + __len;
}
}
|
看else分支即可:
- 如果当前size为0, 则分配1个对象内存大小,否则扩容至两倍大小。(也就是说vector的内存分配是 1, 2, 4, 8… 的策略)
- 先将
_M_start 到 __position位置处的所有内存拷贝至 __new_finish处
- 在
__new_finish 处构造 __x,并++_new_finish
- 将
__position到_M_finish处的所有内存,拷贝至__new_finish
- 最后析构并释放原来的老内存
- 更新三个重要的成员变量
3. pop_back·
1
2
3
4
5
|
void pop_back() {
--_M_finish;
destroy(_M_finish);
}
|
析构但并不释放内存。
思考: 看样子老版本的vector有个缺点:如果在过去的整个时间段内,只有非常短的时间里将vector插得很长,但只要vector不完全析构,这片很长的内存得不到释放。 老版本只能通过 swap的机制来完全释放内存,不像新版本可以使用shrink_to_fit可以灵活释放多余内存
4. insert·
看过 push_back后, insert很简单:
1
2
3
4
5
6
7
8
9
10
11
|
iterator insert(iterator __position, const _Tp& __x) {
size_type __n = __position - begin();
if (_M_finish != _M_end_of_storage && __position == end()) {
construct(_M_finish, __x);
++_M_finish;
}
else
_M_insert_aux(__position, __x);
return begin() + __n;
}
|
若插入点为end(), 则直接插入。 否则走 _M_insert_aux流程。
5. swap·
1
2
3
4
5
6
7
|
void swap(vector<_Tp, _Alloc>& __x) {
__STD::swap(_M_start, __x._M_start);
__STD::swap(_M_finish, __x._M_finish);
__STD::swap(_M_end_of_storage, __x._M_end_of_storage);
}
|
swap非常简单,和x对象交换内部三个重要的成员变量,此外,注意交换的对象的模板要完全一致,包括分配器的类型。这个操作的cost非常低,一般用于释放原内存,以及多并发的时候,将全局的某个带锁的vector的内存吐到局部不带锁的vector, 减少锁竞争。
如:
1
2
3
4
5
6
7
| std::vector<int> vec1;
{
std::vector<int> vec2;
vec1.swap(vec2);
}
|
6. iterator相关·
vector的iterator实际上就是value指针:
1
2
| typedef _Tp value_type;
typedef value_type* iterator;
|
所以:
1
2
3
4
| iterator begin() { return _M_start; }
const_iterator begin() const { return _M_start; }
iterator end() { return _M_finish; }
const_iterator end() const { return _M_finish; }
|
如上iterator函数族直接返回的是内存的成员变量。
3. 总结·
vector容器相对简单,注意点主要是 容量不足时的扩容策略(2倍扩容),另外,vector也不是线程安全的,使用时需要拷贝数据竞争问题。